� Back To Index
The <particle_system_obstacle> node
Function
The particle_system_obstacle node specifies the type of obstacle for the flow of particles.
An obstacle is an object which makes it possible to change the trajectory of a particle.
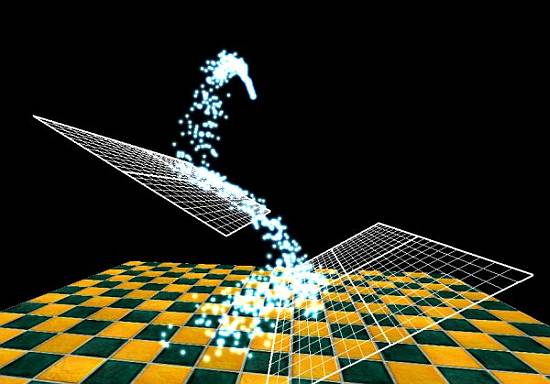
The image below, resulting from a Hyperion tutorial
HyperGraph 29 shows a POINT type emitter
associated with 1 GRAVITY type action and 2 PLANE type obstacles:
General syntax
<particle_system_obstacle />
Noeud exhaustif avec attributs et valeurs par d�faut:
<particle_system_obstacle
name=""
master_object=""
type="PLANE"
bounce="0.3"
friction="0.4" />
particle_system_obstacle element
particle_system_obstacle is the xml tag that defines a particle_system_obstacle node.
Attributes:
- name - [STR127] - name of the node. This name will make it possible to refer this node throughout
the XML script.
- master_object - [STR127] - specifies the object which controls the basic shape of the obstacle.
- type - [ENUM] - obstacle type:
type specifies the emitter type, i.e. its basic shape (plan, sphere, disc, etc...). This
instruction goes hand in hand with the particle_system_obstacle_master_object insruction: indeed, the
characteristics of each type of obstacle (position, radius, length, etc...) are initialized by the node
describing the object (called in this context the master-object): please see the primitive node for more
information.
- bounce - [REAL] - specifies the rebound coefficient of the obstacle surface - default value: 0.3
- friction - [REAL] - specifies the adherence (or friction) factor on the obstacle surface - default value: 0.5